   .jpg)  El contenedor de carga se llena manualmente y el robot toma secuencialmente los espacios en blanco para agregarlos uno por uno;
La pinza 1 de la pinza robot 1 agarra la pieza en blanco y espera afuera de la puerta del torno. Se procesa el producto semiacabado en el torno 1, se abre la puerta del torno y la pinza 2 retira el producto semiacabado después de completar el torno, y reemplaza la pinza superior 1 De las partes rugosas, el robot la pinza sale del torno, la puerta del torno está cerrada y el torno comienza a procesar OP10;
La pinza 2 de la pinza robot 1 coloca el producto semiacabado en un lado de la mesa de inversión, y luego usa la pinza 1 para agarrar el producto semiacabado del otro lado; la pinza 1 de la pinza robot 1 agarra el producto semiacabado y espera afuera de la segunda puerta del torno. Después de completar el mecanizado de la pieza de trabajo en la segunda, se abre la segunda puerta del torno, y la pinza 2 retira el producto terminado de la segunda pinza y reemplaza el producto semiacabado de la pinza superior 1. La pinza del robot sale el torno dos, la segunda puerta del torno está cerrada, y el torno dos comienza a procesar OP20;
El producto terminado de la pinza de aire 2 de la pinza de robot 1 se transfiere al almacenamiento temporal de la mesa de colocación de agarre, y el robot se reemplaza por la pinza de robot 2;
La pinza de aire 3 de la pinza de robot 2 transporta el producto terminado al depósito inferior;
El robot se reemplaza con una pinza robot 1;
Repita los pasos anteriores.
.jpg)
El robot GSK RB08A3 utiliza la herramienta de doble sujeción en el extremo para agarrar la cubierta del extremo del motor y moverla a la máquina herramienta para el procesamiento moviendo la armadura, mientras logra la supresión automática.
.jpg)
Especificaciones ·
GSKRB08A3 Robot universal
Número de ejes de movimiento: 6 ejes.
Carga útil máxima: 8 kg
Precisión de posicionamiento repetida: ± 0.05 mm
Los robots de manipulación se utilizan ampliamente en sistemas de manipulación automática, como la carga y descarga de máquinas herramientas y líneas de producción de estampado;
Ventajas del producto ·
Mejorar la tasa de utilización de máquinas herramienta y la calidad del producto;
Se proporcionan dos juegos de agarraderas manuales, un juego se usa para cargar y descargar, el otro juego se usa para empacar y la herramienta de cambio rápido se usa para realizar el reemplazo entre los agarres manuales;
La consistencia de alta calidad reduce el riesgo de piezas defectuosas causadas por la rotación de los trabajadores;
La estación de trabajo móvil de pórtico aprovecha al máximo el espacio superior de la máquina herramienta para liberar el espacio de trabajo en el suelo, lo cual es conveniente para el mantenimiento de máquinas herramienta y otros equipos, y la tasa de utilización del equipo es mayor que la del esquema general de automatización .
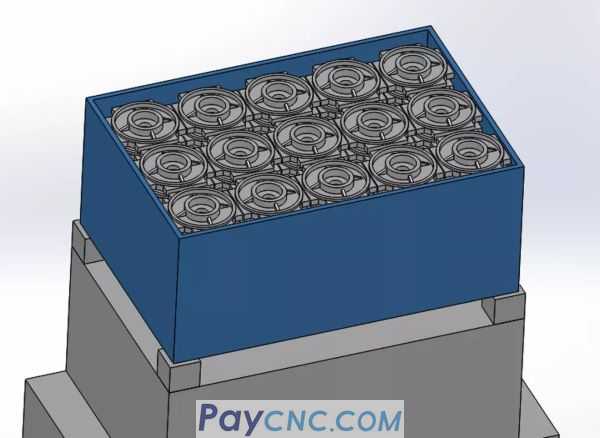
Contenedor de carga
El alimentador automático de alambre adopta un alimentador giratorio en capas. Al tiempo que garantiza la precisión de alimentación, la columna de posicionamiento debe ajustarse al reemplazar partes de diferentes especificaciones. Como se muestra en la figura, el bastidor de material giratorio apilado está controlado por un servomotor y un sistema.
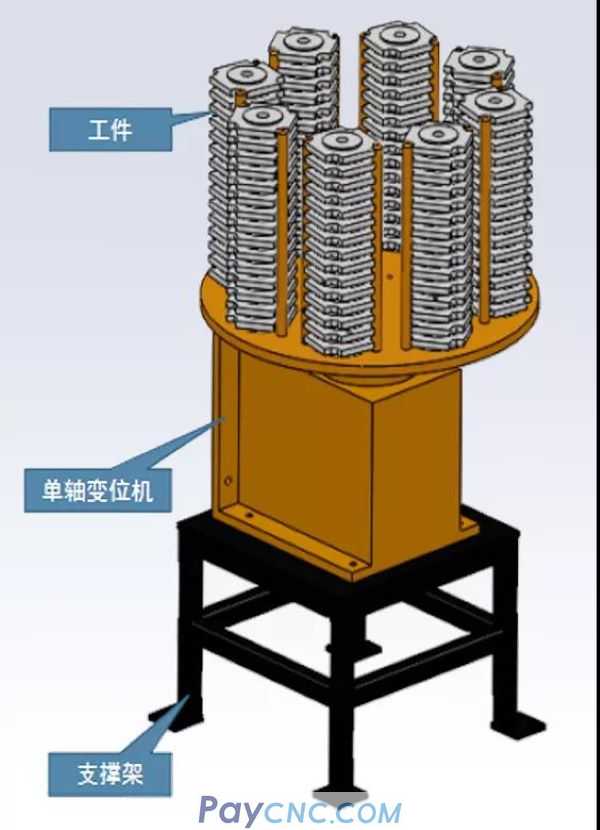 
El trabajador abandonó el silo después de que estaba lleno de espacios en blanco.
Cuando trabaja, el robot toma secuencialmente los espacios en blanco de arriba a abajo. Después de agarrar la pila de espacios en blanco, el estante de almacenamiento gira automáticamente una estación.
El sensor en el estante de almacenamiento puede detectar automáticamente el nivel de material. Si el sensor no puede detectar ningún material en un minuto, enviará una señal de advertencia para recordarle al trabajador que agregue el material al silo.
Si no se detecta material en tres minutos, se envía una señal para detener la máquina. Toda la máquina está diseñada con múltiples protecciones, segura y confiable.
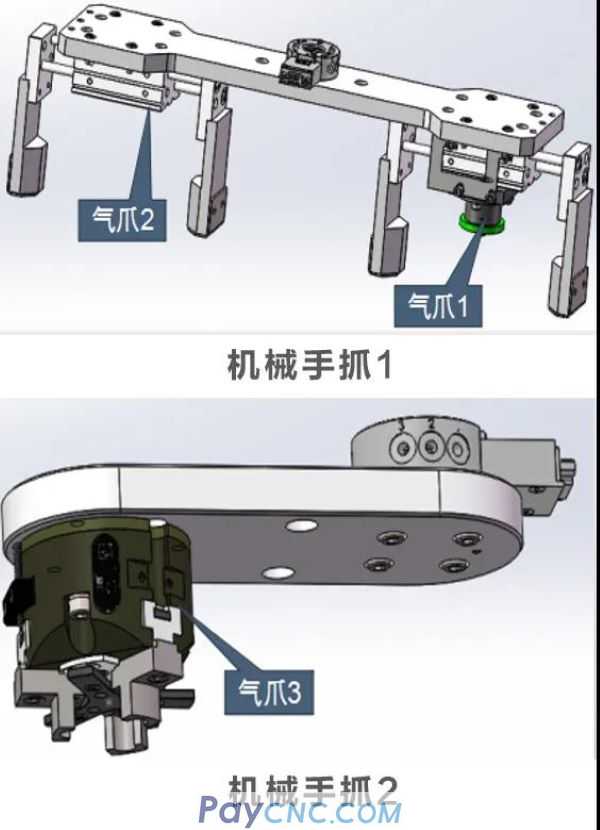
Agarre robot
De acuerdo con la colocación de las piezas de trabajo en el accesorio de la máquina herramienta y el silo, se requieren dos juegos diferentes de pinzas para satisfacer las necesidades de producción

Instrucciones de herramientas ·
La pinza mecánica 1 adopta la estructura de doble pinza, que realiza el reemplazo rápido de la pieza de trabajo en la máquina herramienta, lo que ahorra mucho tiempo de reabastecimiento de combustible y mejora la tasa de utilización de la máquina herramienta.
La pinza mecánica 2 adopta una estructura de pinza única, que se mueve con flexibilidad después de agarrar la pieza de trabajo, y la pieza de trabajo se puede colocar perfectamente en el contenedor de descarga
Conmutador
La estructura de la tabla de conmutación se muestra a la derecha, la estructura es simple y el costo es bajo.
 
El robot coloca la pieza de trabajo en la mesa de conmutación y luego toma la pieza de trabajo del otro lado
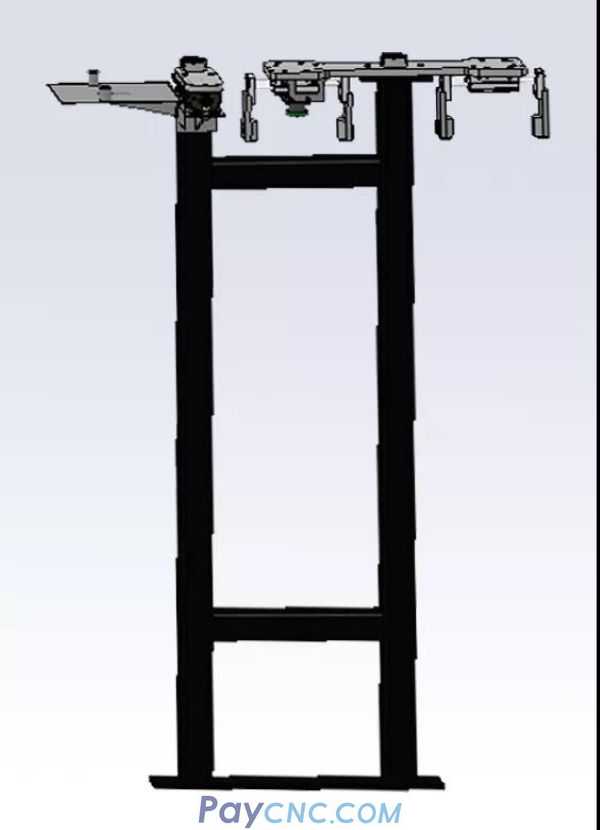
Soporte de cambio rápido
La estructura de la mesa de colocación manual se muestra a la izquierda, la estructura es simple y práctica.
 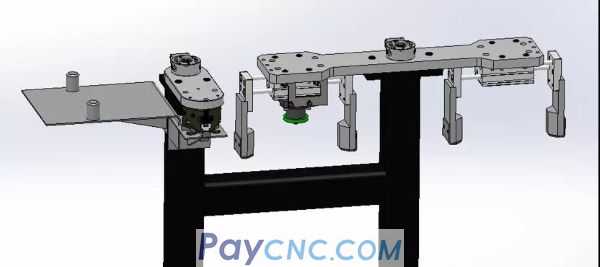
Al trabajar, el robot coloca la pieza de trabajo en la mesa de almacenamiento temporal, el robot mueve el mango del robot 1 a la posición correspondiente, libera el dispositivo de cambio rápido y luego se mueve por encima del mango del robot 2, cierra el dispositivo de cambio rápido para agarrar La empuñadura del robot 2, para reemplazar la pinza mecánica
Contenedor de descarga
La estructura de la descarga.
|
 |
| Products Catalogue | Home | About Us | Retrofit | Download | News | Tech Support | Contact Us | |
|
|
|