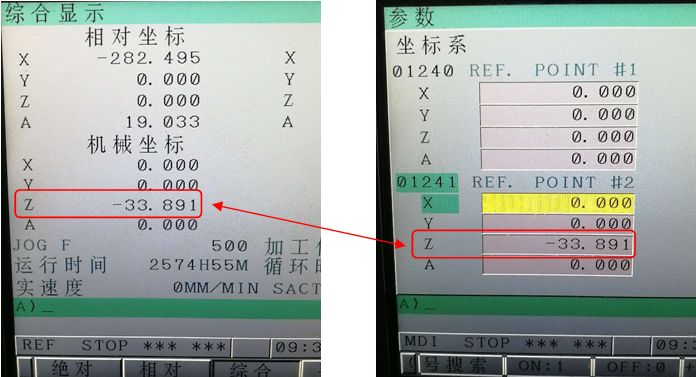
• No.1240: The coordinate value of the first reference point in the machine coordinate system.
• No.1241: The coordinate value of the second reference point in the machine coordinate system.
• No.1242: The coordinate value of the third reference point in the machine coordinate system.
• No.1243: The coordinate value of the fourth reference point in the machine coordinate system.
Among these, No.1240 is a protected parameter. When the machine returns to the reference point, it moves to the coordinates specified under this parameter. For the other parameters (No.1241, No.1242, and No.1243), you can set machine coordinate values and call these reference points using the G30 command. The first reference point is called using the G28 command.
Examples:
1. Calling the Second Reference Point:
• Command: G30 P2 X0 Y0 Z0;
• Execution: The machine will move to the XYZ coordinate values set in parameter No.1241.
2. Setting the Third Reference Point:
• Programming: G30 P3 X0 Y0 Z0;
• Execution: The machine will move to the XYZ coordinate values set in parameter No.1242.
Applications:
• The second, third, and fourth reference points can be used as fixed points for tasks such as tool changes or robot loading/unloading operations.
Adjustments:
• If the position needs to be changed, simply modify the XYZ coordinate values in parameters 1241 to 1243. |
